Voir la traduction automatique
Ceci est une traduction automatique. Pour voir le texte original en anglais cliquez ici
#Tendances produits
{{{sourceTextContent.title}}}
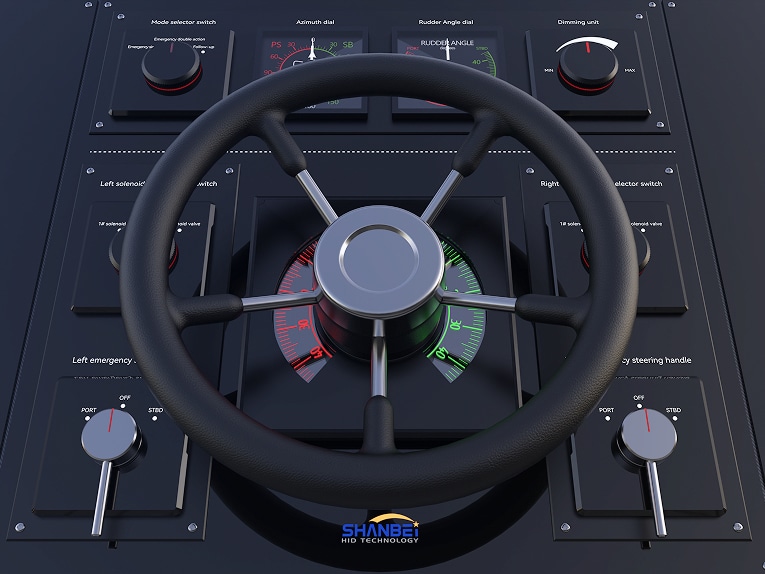
Panneau de contrôle de la direction marine
{{{sourceTextContent.subTitle}}}
Le tableau de commande de l'appareil à gouverner marin est l'élément central du système de contrôle de la navigation maritime, et sa conception doit s'adapter à l'environnement marin difficile, tout en tenant compte de la fiabilité, de la sécurité et de la facilité d'utilisation
{{{sourceTextContent.description}}}
1. Éléments de conception du matériel
1) Adaptation à l'environnement
① Niveau de protection : Conception IP56 étanche à l'eau et à la poussière pour résister aux vagues, au brouillard salin et à l'humidité.
② Résistance à la température et aux tremblements de terre : large plage de température de fonctionnement (-20°C~+60°C), test de vibration (tel que la norme ISO 6954), pour s'adapter aux turbulences des navires.
③ Sélection des matériaux : La coque utilise un métal résistant à la corrosion (tel que l'alliage d'aluminium) ou un plastique renforcé, et le circuit interne est recouvert de trois peintures antirouille.
2) Alimentation et protection
① Alimentation redondante : Prend en charge deux entrées d'alimentation (telles que l'alimentation principale et la batterie de secours) pour garantir que le système peut toujours fonctionner lorsque l'alimentation est coupée.
② Suppression des surtensions : Les diodes TVS et les fusibles sont configurés pour faire face aux fluctuations de tension dans le réseau électrique du navire (tel que 12V/24V DC).
③Protection EMI/EMC : conception du blindage pour éviter les interférences électromagnétiques, conformément aux normes électriques maritimes (telles que la norme IEC 60945).
3) Interface et communication
① Prise en charge du protocole standard : intégration du protocole NMEA 0183/NMEA 2000 et interaction des données des équipements de navigation (tels que GPS, compas).
② Extension du bus : Connecter le module d'entraînement de l'actionneur via le bus CAN ou RS485, et prendre en charge la mise en cascade de plusieurs dispositifs.
2. Éléments de conception fonctionnelle
1) Fonction de commande principale
commutateur de mode manuel/automatique : Prise en charge de la direction manuelle d'urgence (comme la commande de la poignée) et du système de conduite automatique (comme la connexion AP).
② Limite de sécurité : double protection de la limite logicielle et de la limite mécanique pour empêcher le dépassement du safran (par exemple, angle limite de ±35°).
③ Compensation dynamique : ajustement automatique de l'effet du gouvernail en fonction du tirant d'eau du navire et des vagues de vent (nécessité d'intégrer le capteur d'inclinaison ou l'algorithme de compensation des vagues).
2) Gestion des alarmes et des défauts
① Surveillance en temps réel : affichage de la déviation de l'angle du gouvernail, de la température du moteur, de la pression hydraulique et d'autres paramètres, alarme sonore et lumineuse en cas de dépassement des limites.
② Commutation automatique : lorsque l'appareil à gouverner tombe en panne, il passe automatiquement à l'appareil à gouverner de secours et en informe la passerelle.
③ Fonction boîte noire : Stocke les journaux de fonctionnement de l'appareil à gouverner (tels que l'heure, l'angle et le code d'erreur) et prend en charge l'exportation des données.
3. Conception de l'interface utilisateur
1) Interaction des opérations
① Bouton physique : bouton étanche de grande taille (tel que l'arrêt d'urgence, le changement de mode), adapté au port de gants.
② Affichage graphique : écran LCD/LED à haute luminosité, affichant le cap du navire, la courbe d'angle du gouvernail et l'état du système.
③ Invitation vocale : en cas d'urgence, diffusion d'informations sur les défaillances (telles que "surcharge de l'appareil à gouverner, veuillez vérifier").
2) Fonctionnement redondant
① Commande à distance : Pont de support, commande à double position de la cabine, les opérations clés doivent être confirmées deux fois (comme le déverrouillage de l'arrêt d'urgence).
② Poignée/bouton : fournit une poignée mécanique pour le pilotage d'urgence, prend en charge le contrôle proportionnel (tel que l'angle du gouvernail et la réponse linéaire du déplacement de la poignée).
4. Adaptation aux scénarios spéciaux
1) Brise-glace/navires de haute mer
① Optimisation du démarrage à basse température : réveil rapide dans un environnement de -40°C, le système hydraulique doit être conçu pour éviter le gel.
②Protection contre les pressions élevées : adaptation aux exigences de pression d'huile élevées de l'appareil à gouverner de haute mer (par exemple 31,5 MPa).
2) Navires de navigation intérieure
① Interface simplifiée : suppression des fonctions complexes, maintien des fonctions de pilotage et d'alarme de base, réduction de la difficulté d'utilisation.
② Solution à faible coût : utilisation d'un module universel d'entraînement de l'appareil à gouverner, prise en charge du protocole Modbus et intégration de l'automate marin.
5. Essais et maintenance
1) Essais environnementaux
① Essai au brouillard salin (IEC 60068-2-52), cycle de chaleur humide (IEC 60068-2-30) pour vérifier la résistance à la corrosion.
② Essai de vibration (vibration sinusoïdale + vibration aléatoire) simulant les conditions d'exploitation du navire.
2) Maintenance
① Rappels d'entretien réguliers.



